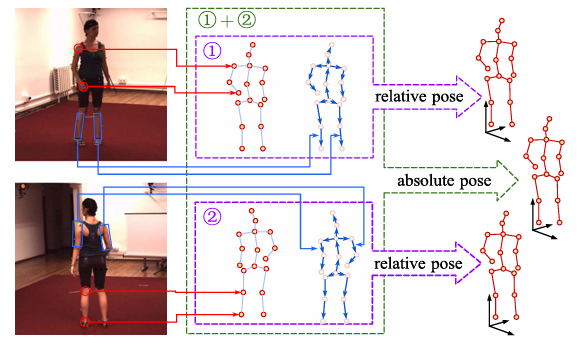
Joint-Limb Compound Triangulation With Co-Fixing for Stereoscopic Human Pose Estimation IEEE Transactions on Multimedia, 2024 Zhuo Chen, Xiaoyue Wan, Yiming Bao, and Xu Zhao Paper ➜
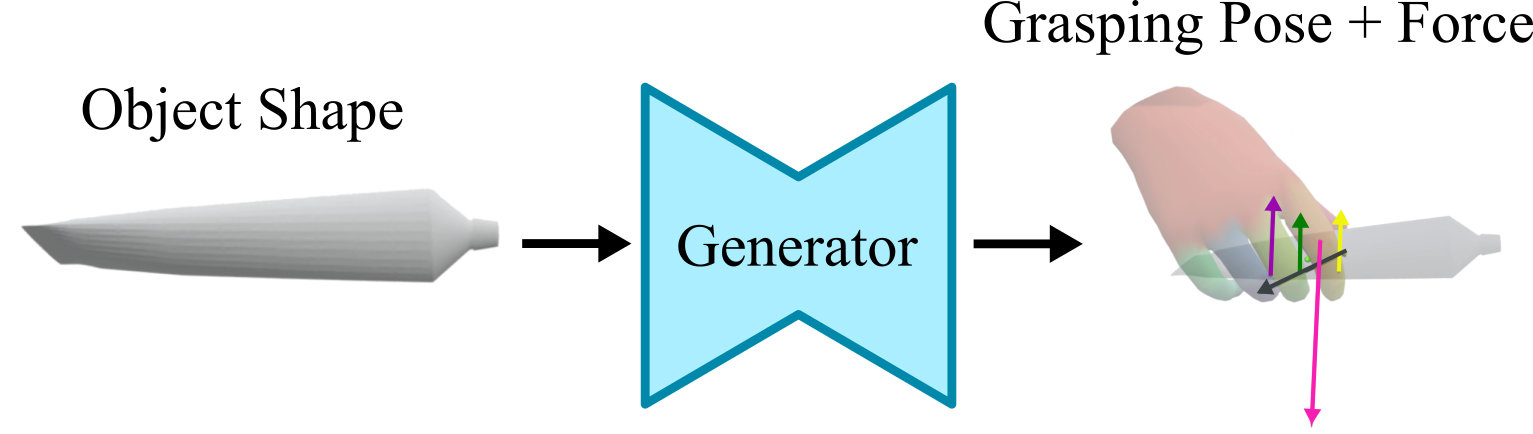
Force-Aware 3D Contact Modeling for Stable Grasp Generation Annual AAAI Conference on Artificial Intelligence, 2026 Zhuo Chen, Zhongqun Zhang, Yihua Cheng, Ales Leonardis, Hyung Jin Chang Paper ➜ Webpage ➜
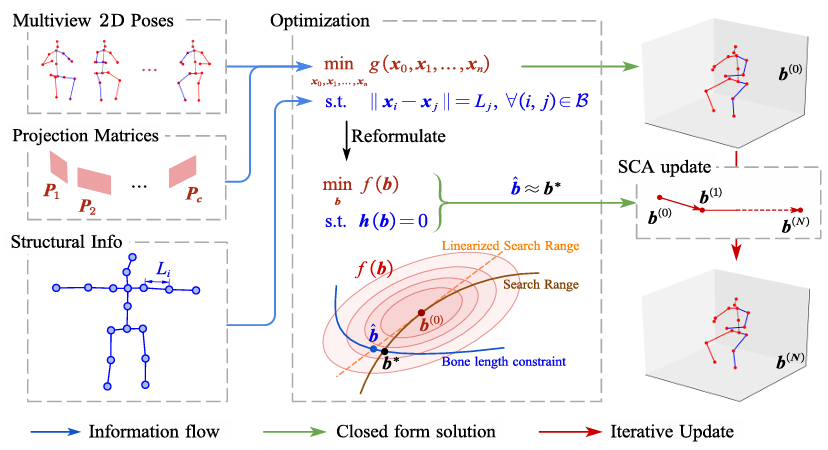
Structural Triangulation: A Closed-Form Solution to Constrained 3D Human Pose Estimation Computer Vision - ECCV 2022, 2022 Zhuo Chen, Xu Zhao, and Xiaoyue Wan Paper ➜